

机械臂 电控方案
源代码
https://www.gitpp.com/japxin/gen-project088-mini-arm
一个适用于T站五轴机械臂Robotic arm的电控方案。基于ESP32构建,使用支持Xbox协议的控制器通过摇杆控制机械臂。该系统采用 FreeRTOS 任务编排,在 ESP32 的双核架构上协调输入处理、运动控制和状态指示。

电源选型
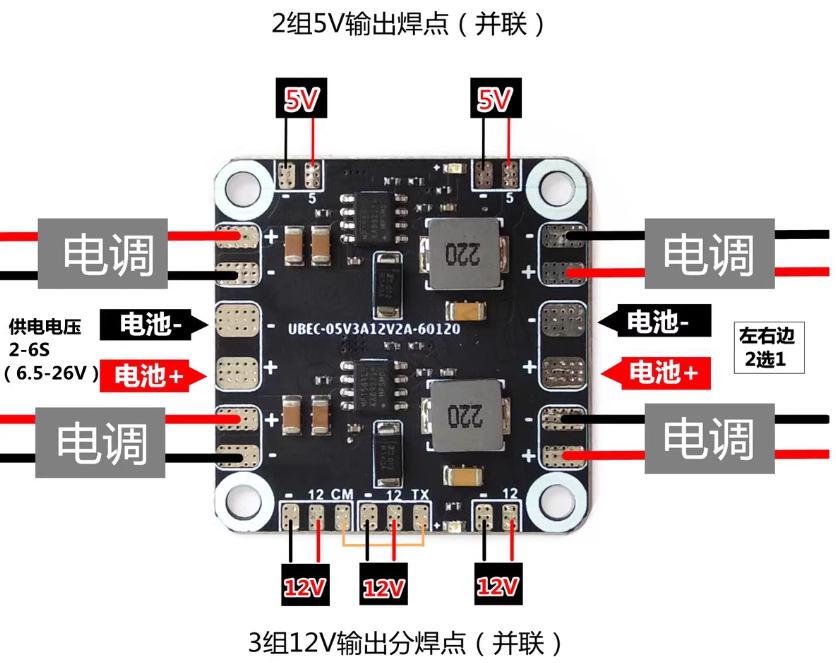
250穿越机降压分电板支持6.5-26V输入,电池电压、12V、5V输出,要获得稳定12V输出时需选用至少4S电池。本项目中使用了24V的DJI经纬M100的TB47D电池。
下图中的电调焊盘与电池焊盘是并联关系,12V或电调输出端可以供给步进电机驱动器使用,5V可供给所有舵机和MCU使用。
模块为两路降压电路并联,当其中一路电路损坏时,电流可能不足以驱动所有舵机,需要更换整个模块。
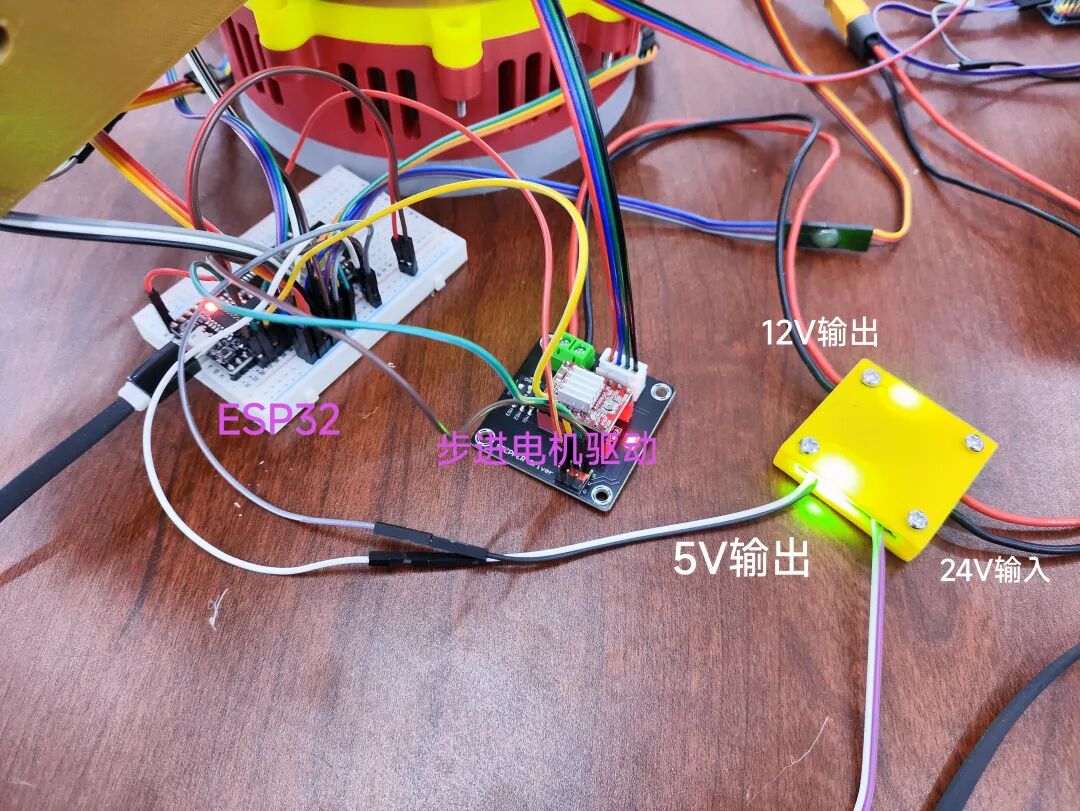
验证实物连线图:
手柄连接
大部分支持Xbox协议的手柄都能通过蓝牙连接ESP32。按照以下步骤配置完MAC地址后ESP32即可自动连接上手柄
替换地址
-
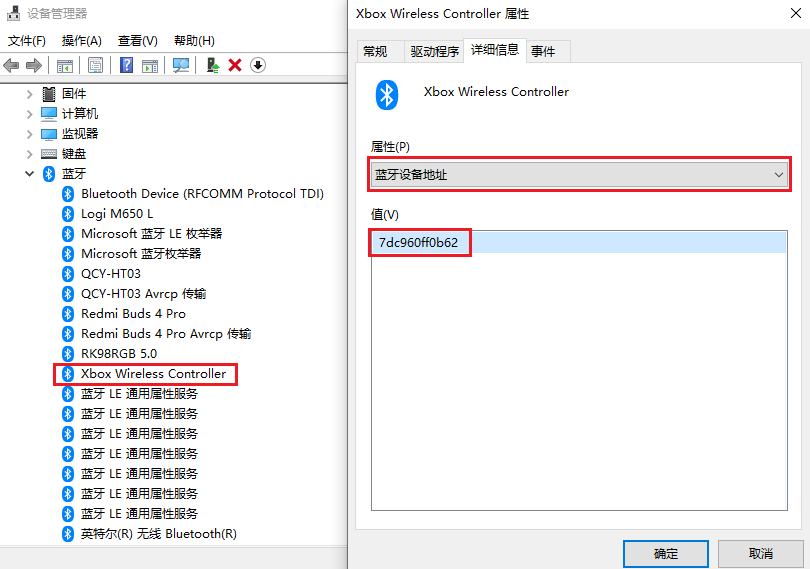
用电脑蓝牙连接手柄 -
打开设备管理器,找到:蓝牙->Xbox Wireless controller->双击打开->详细信息->属性栏下拉->找到“蓝牙设备地址”->得到地址 -
把地址替换到代码对应位置 ./src/joystick_task.cppxboxController = XboxSeriesXControllerESP32_asukiaaa::Core("7d:c9:60:ff:0b:62");
连接到ESP32
把代码烧录到开发板后,首次连接手柄的时候需要让手柄进入配对模式(小鸡启明星是同时长按LOGO键和LOGO键正下方的键,Xbox是长按LOGO键),这时通常指示灯会快闪,等待与ESP32配对成功后指示灯常亮,成功后第二次就可以直接连了。如果手柄在配对模式长时间连接不上,可以按一下开发板的RESET。
系统架构
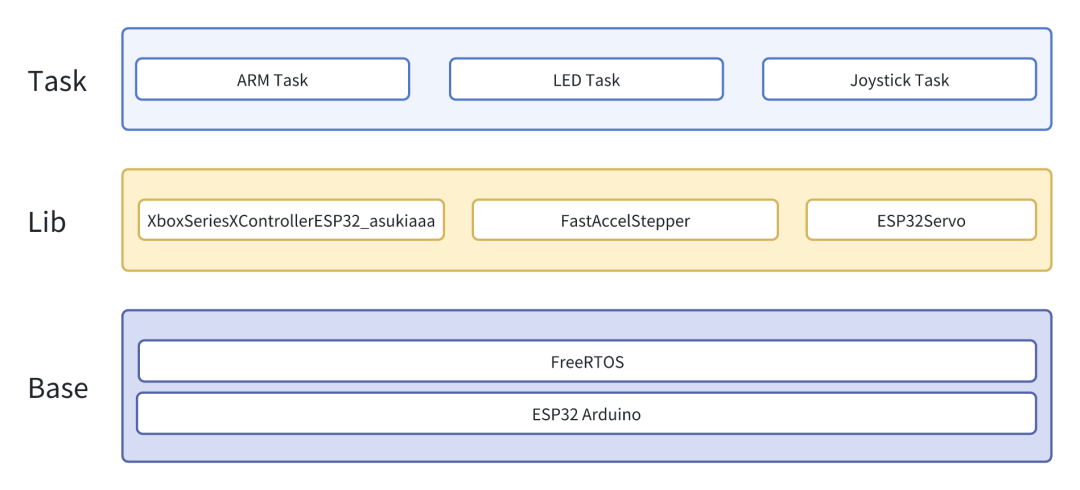
本程序在软件方面的架构分为三层,底层采用集成FreeRTOS的ESP32 Arduino框架,库依赖采用了三个通过PlatformIO管理的外部库,用于驱动Xbox手柄、步进电机、舵机,顶层的三个任务分别控制机械臂运动、LED指示、摇杆数据处理。
任务配置
ESP32是具有两个核心的单片机,可以真正意义上实现双线程并行。FastAccelStepper库可以实现对步进电机的非阻塞式控制,即调用步进电机的运动函数后,代码可以继续向下执行,无需等待步进电机运动到指定位置。实现原理是创建一个RTOS任务,在每次任务运行时对步进电机进行控制,而非在运动函数中直接控制电机运行。Arm Task在调用engine.init(0)初始化时会创建一个名为StepperTask的任务。为确保步进电机平稳运行,将步进电机任务配置在核心0,其它任务配置在核心1。
因步进电机引脚占用了LED引脚,禁用了LED任务的运行。
|
|
|
|
|
|
|
|---|---|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
共享数据管理架构
系统使用FreeRTOS互斥锁,以协调手柄任务和机械臂控制任务之间线程安全的资源共享。

开源项目介绍:基于ESP32的T站五轴机械臂电控方案
该项目是一个针对T站五轴机械臂(Robotic Arm)的开源电控解决方案,采用 ESP32双核单片机 作为核心控制器,结合 Xbox协议手柄 实现无线操控,并通过 FreeRTOS实时操作系统 实现多任务并行处理。系统支持步进电机驱动、舵机控制、电源管理等功能,适用于教育、科研、DIY机器人开发等场景。
一、核心功能与技术亮点
1. 硬件架构
- 主控芯片
:ESP32(双核,240MHz主频,支持Wi-Fi/蓝牙) -
利用双核特性实现 任务隔离:核心0负责步进电机控制(高实时性),核心1处理手柄输入和状态指示。 - 电源管理
: -
采用 250穿越机降压分电板,支持6.5-26V输入,输出12V(驱动步进电机)、5V(驱动舵机和MCU)。 -
示例使用 DJI经纬M100的TB47D电池(24V),通过分电板降压后供电。 - 电机驱动
: -
步进电机:通过 FastAccelStepper库 实现非阻塞式控制,支持梯形加减速曲线。 -
舵机:直接由ESP32的PWM引脚控制(5V供电)。 - 手柄输入
: -
支持所有兼容Xbox协议的蓝牙手柄(如Xbox Series X/S、小鸡启明星等)。 -
手柄MAC地址通过代码配置,首次配对后自动连接。
2. 软件架构
- 操作系统
:FreeRTOS(集成于ESP32 Arduino框架) - Arm Task
:机械臂运动控制(核心1,优先级1)。 - Joystick Task
:摇杆数据接收与处理(核心1,优先级1)。 - Stepper Task
:步进电机驱动(核心0,优先级25,确保实时性)。 - Led Task
:状态指示(禁用,因引脚冲突)。 -
实现 多任务并行: - 线程安全
: -
使用 FreeRTOS互斥锁 保护共享数据(如手柄输入与机械臂控制之间的坐标变量)。 - 库依赖
: - Xbox手柄驱动
: XboxSeriesXControllerESP32_asukiaaa - 步进电机控制
: FastAccelStepper - 舵机控制
:ESP32原生PWM
3. 关键特性
- 非阻塞式电机控制
: -
步进电机任务通过RTOS定时触发,避免阻塞主程序,提升系统响应速度。 - 低延迟无线操控
: -
Xbox手柄蓝牙连接延迟低于50ms,满足实时控制需求。 - 模块化设计
: -
电源、电机、手柄、状态指示独立模块化,便于扩展(如增加传感器或视觉模块)。
二、应用场景
1. 教育与研究
- 机器人教学
: -
高校机器人课程实验平台,学生可学习嵌入式开发、RTOS、电机控制等知识。 - 科研原型开发
: -
快速验证机械臂运动学算法(如逆运动学解算)、力控策略等。
2. 工业与自动化
- 轻量化自动化设备
: -
适用于小型分拣、装配、焊接等场景(需替换为工业级电机和电源)。 - 远程操控
: -
通过Wi-Fi扩展实现手机/PC端监控,结合手柄实现危险环境(如辐射区)的远程作业。
3. DIY与创意开发
- 开源硬件社区
: -
机械臂爱好者可基于此方案二次开发(如增加机械爪、摄像头模块)。 - 艺术装置
: -
结合LED灯带、传感器实现交互式机械臂表演(如跟随音乐节奏动作)。
4. 商业产品原型
- 低成本机械臂控制核心
: -
企业可基于此方案快速开发消费级机械臂(如咖啡拉花机器人、书法机器人)。
三、技术价值与优势
1. 成本效益
- 硬件成本低
: -
ESP32开发板(约5/轴)+ 舵机(约100**(五轴机械臂)。 - 开源免费
: -
无需购买商业控制器(如Arduino Mega+Ramps板约500+)。
2. 性能对比
|
|
|
|
|
|---|---|---|---|
| 多任务支持 |
|
|
|
| 电机控制延迟 |
|
|
|
| 扩展性 |
|
|
|
| 开发门槛 |
|
|
|
3. 生态兼容性
- 手柄支持广泛
: -
兼容所有Xbox协议手柄,避免专有控制器的绑定。 - 开源社区支持
: -
基于PlatformIO管理依赖,方便跨平台开发(Windows/Linux/macOS)。
四、潜在改进方向
- 增加传感器融合
: -
集成IMU、力传感器实现闭环控制,提升定位精度。 - 支持ROS
: -
添加ROS节点,实现与机器人操作系统的兼容。 - 工业级加固
: -
替换为STM32H7+RTOS(如Azure RTOS),满足-40℃~85℃工作温度。 - AI扩展
: -
集成ESP32-S3的AI加速核心,实现视觉识别(如物体抓取点检测)。
五、总结:开源的意义与未来
该项目通过 “低成本硬件+高性能软件” 的组合,降低了机械臂开发的门槛,为教育、科研和DIY社区提供了可定制的电控核心。其价值不仅在于技术实现,更在于:
- 推动机器人技术普及
:让更多人能接触并学习机械臂控制; - 激发创新应用
:开源社区的二次开发可能催生新的应用场景(如医疗辅助、农业采摘); - 商业转化潜力
:企业可基于此方案快速推出低成本机械臂产品,抢占消费级市场。
未来展望:随着ESP32-C6(支持Wi-Fi 6/BLE 5.0)和ESP32-H2(支持Matter协议)的发布,该方案可进一步升级为 物联网机械臂控制器,实现多设备协同和云端管理。
机械臂 电控方案
源代码
https://www.gitpp.com/japxin/gen-project088-mini-arm
一个适用于T站五轴机械臂Robotic arm的电控方案。基于ESP32构建,使用支持Xbox协议的控制器通过摇杆控制机械臂。该系统采用 FreeRTOS 任务编排,在 ESP32 的双核架构上协调输入处理、运动控制和状态指示。
本篇文章来源于微信公众号: GitHubFun网站












暂无评论内容