
无人机飞控 + 无人机识别算法平台,开源!实现无人机航拍微小目标检测
源代码
https://www.gitcc.com/gcc-ai-lab/gcc-yolo-platform
GCC AI LAB开源
无人机飞控平台 + 无人机识别算法平台,开源!实现无人机航拍微小目标检测
无人机飞控:
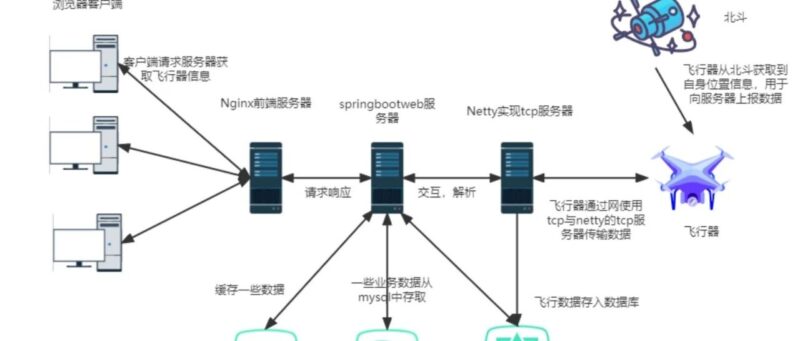
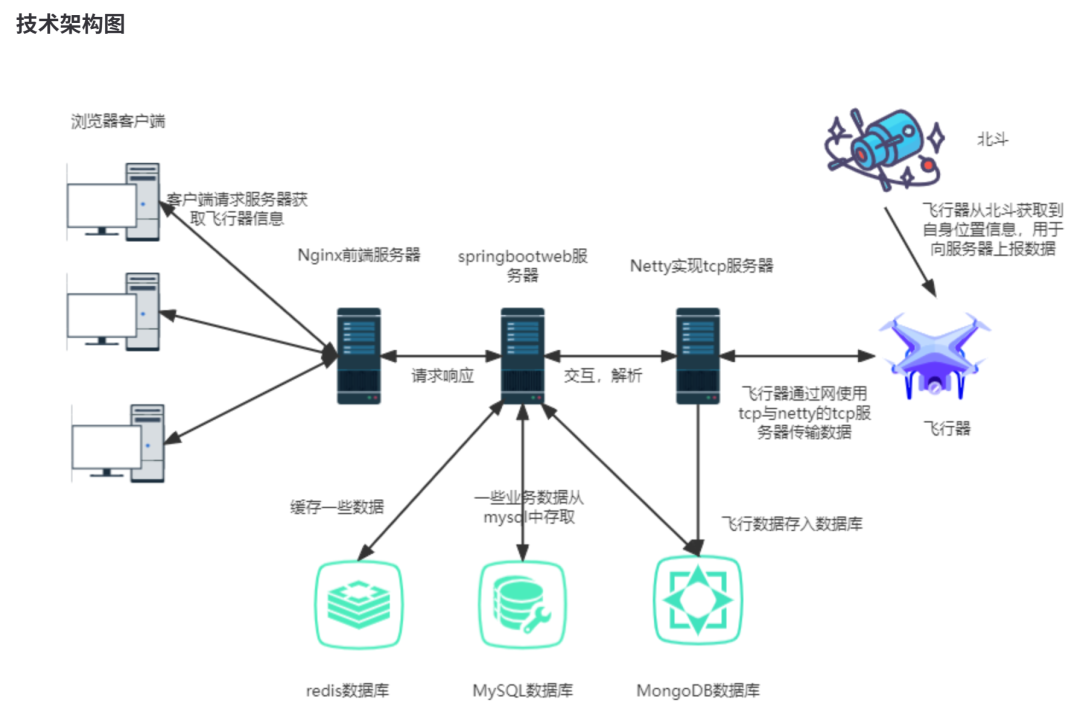
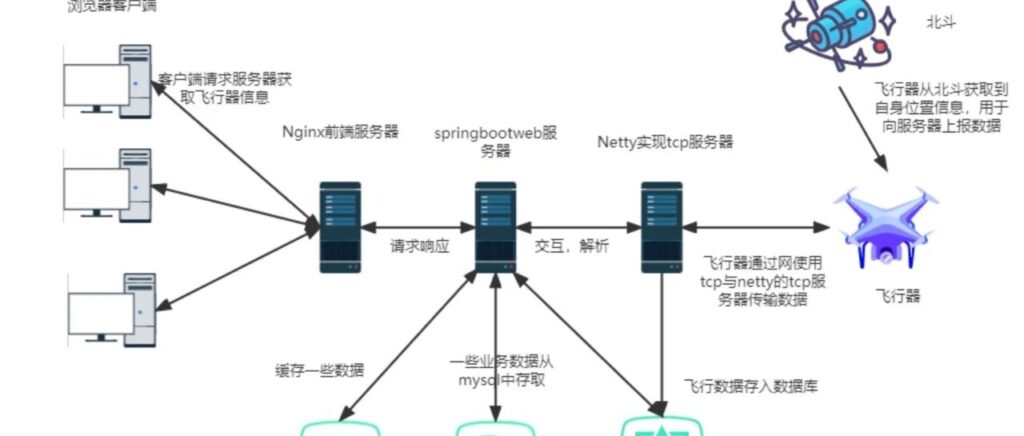
飞行管控平台(Erlang Flight Control Platform)是一个基于 Spring Boot + Vue.js 开发的无人机实时监控与管理系统。系统支持无人机的实时位置追踪、飞行路径规划、禁飞区管理、历史轨迹回放等核心功能,为无人机运营提供全方位的管控解决方案。
核心特性
-
✈️ 实时监控:基于 Netty 的 TCP 长连接,实时接收无人机位置数据 -
🗺️ 地图可视化:集成高德地图和百度地图,支持多地图切换 -
📍 路径规划:支持飞行路径的创建、编辑和管理 -
🚫 禁飞区管理:可视化绘制和管理禁飞区域 -
📊 历史回放:支持无人机历史飞行轨迹的回放功能 -
👥 权限管理:基于若依框架的完整权限管理体系 -
📱 多端支持:Web 管理端 + 无人机客户端模拟器
算法平台 GCC算法训练平台
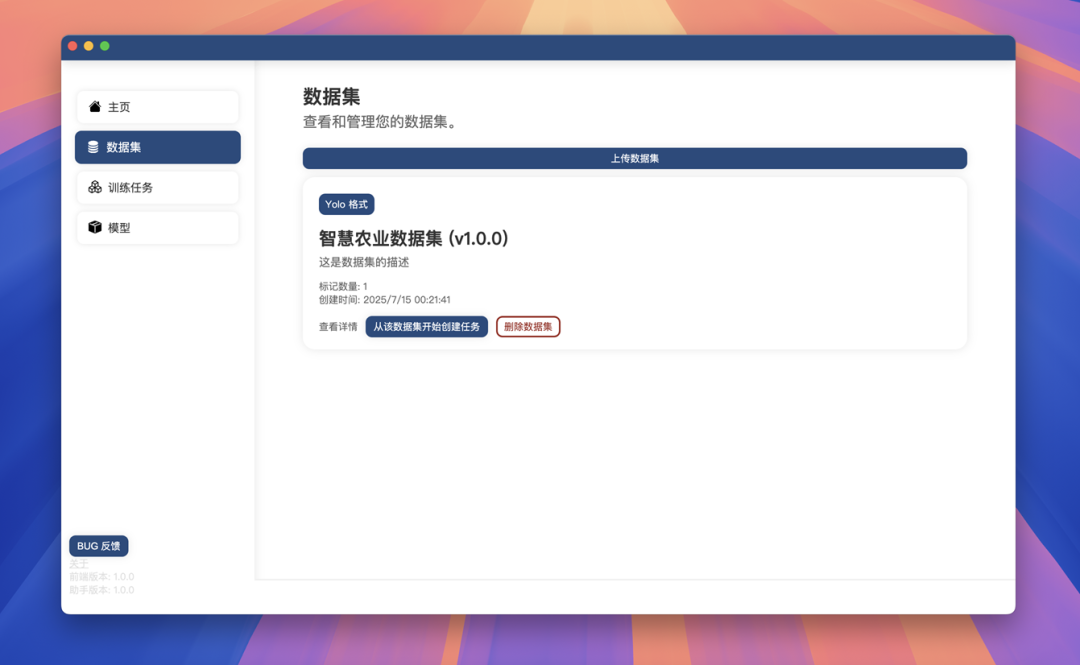
YOLO 模型训练可视化工具,支持数据集上传、模型训练、训练进度监控、模型测试及结果可视化,旨在降低视觉学习检测任务的入门门槛



无人机识别算法
无人机监测 基于 YOLOv11n 的无人机航拍微小目标检测,加入 P2 高分辨率检测头与空洞卷积以提升微小目标召回;支持消融实验、评估与 SAHI 切片推理 数据集 数据集,这是无人机航拍目标检测领域的权威数据集,专门用于应对“图大物小”和“背景复杂”的检测挑战
GCC AI LAB开源项目解析:AI驱动的无人机飞行管控与微小目标检测平台
一、项目概述
GCC AI LAB开源项目整合了无人机飞控平台与AI识别算法平台,形成了一套完整的无人机航拍微小目标检测解决方案。该系统通过实时监控无人机飞行状态、规划路径、管理禁飞区,并结合YOLOv11n目标检测算法,实现了对航拍图像中微小目标的高精度识别。
二、无人机飞控平台:Erlang Flight Control Platform
技术架构:
- 后端
:Spring Boot框架,提供稳定的服务端支持。 - 前端
:Vue.js构建用户界面,实现交互式操作。 - 实时通信
:基于Netty的TCP长连接,确保无人机位置数据的实时传输。 - 地图集成
:支持高德地图与百度地图切换,提供直观的地理信息展示。
核心功能:
- 实时监控
:通过TCP长连接实时接收无人机位置数据,并在地图上动态显示。 - 路径规划
:允许用户创建、编辑和管理飞行路径,确保无人机按预定路线飞行。 - 禁飞区管理
:可视化绘制和管理禁飞区域,防止无人机进入敏感区域。 - 历史轨迹回放
:支持回放无人机历史飞行轨迹,便于事后分析与总结。 - 权限管理
:基于若依框架的完整权限管理体系,确保系统安全。 - 多端支持
:提供Web管理端与无人机客户端模拟器,方便不同场景下的使用。
三、AI识别算法平台:GCC算法训练平台
技术架构:
- 训练框架
:支持YOLO系列模型的训练,特别是针对微小目标检测的YOLOv11n。 - 可视化工具
:提供数据集上传、模型训练、进度监控、模型测试及结果可视化等功能。 - 模型优化
:加入P2高分辨率检测头与空洞卷积,提升微小目标召回率。
核心功能:
- 数据集管理
:支持上传自定义数据集,为模型训练提供数据基础。 - 模型训练
:提供可视化的模型训练界面,用户可配置训练参数并启动训练过程。 - 训练监控
:实时显示训练进度、损失函数值、准确率等关键指标。 - 模型测试
:支持对训练好的模型进行测试,评估模型性能。 - 结果可视化
:展示模型检测结果,包括目标位置、类别、置信度等信息。
四、无人机航拍微小目标检测实现方案
技术实现路径:
- 数据集准备
: -
使用无人机航拍目标检测领域的权威数据集,确保数据多样性与复杂性。 -
对数据集进行预处理,包括标注、裁剪、增强等操作,提高模型泛化能力。 - 模型训练
: -
在GCC算法训练平台上上传数据集,选择YOLOv11n模型进行训练。 -
配置训练参数,如学习率、批次大小、训练轮次等,启动训练过程。 -
监控训练进度,根据损失函数值与准确率调整训练策略。 - 模型部署
: -
将训练好的模型部署到无人机飞控平台上,作为目标检测模块。 -
配置模型参数,如输入尺寸、置信度阈值等,确保模型在无人机上稳定运行。 - 实时检测
: -
无人机在飞行过程中实时采集航拍图像,传输至飞控平台。 -
飞控平台调用部署好的YOLOv11n模型对图像进行目标检测。 -
将检测结果可视化展示在地图上,包括目标位置、类别、置信度等信息。 - 反馈与优化
: -
根据检测结果对无人机飞行路径进行动态调整,优化检测效果。 -
收集实际检测数据,对模型进行持续优化与迭代。
五、开源优势与社区支持
- 开源代码
:项目代码完全开源,允许用户自由使用、修改与分发。 - 社区支持
:拥有活跃的开发者社区,提供技术交流与问题解答支持。 - 持续更新
:项目团队持续对系统进行优化与迭代,引入新技术与新功能。
无人机飞控 + 无人机识别算法平台,开源!实现无人机航拍微小目标检测
源代码
https://www.gitcc.com/gcc-ai-lab/gcc-yolo-platform
GCC AI LAB开源
无人机飞控平台 + 无人机识别算法平台,开源!实现无人机航拍微小目标检测
无人机飞控:
飞行管控平台(Erlang Flight Control Platform)是一个基于 Spring Boot + Vue.js 开发的无人机实时监控与管理系统。系统支持无人机的实时位置追踪、飞行路径规划、禁飞区管理、历史轨迹回放等核心功能,为无人机运营提供全方位的管控解决方案。
本篇文章来源于微信公众号: GitHubFun网站












暂无评论内容