

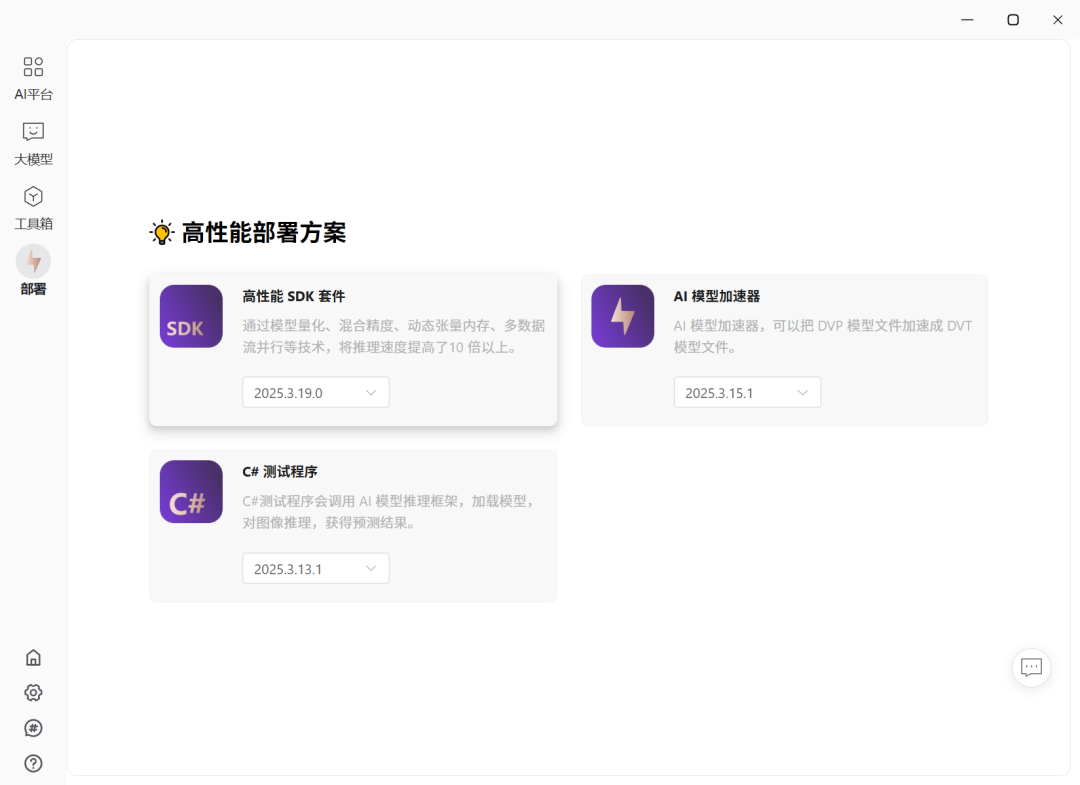
深度视觉AI平台
-
需要安装高性能SDK套件才能加载模型进行推理 -
您需要使用深度视觉AI平台训练模型 -
该SDK提供了模型推理所需的各项功能
使用说明
修改PLC配置
在 ModbusManager.cs 中可以修改PLC相关配置:
串口通信参数设置
_modbusApi.SetSerialPort(settings.PortName,// 串口名称settings.BaudRate,// 波特率settings.DataBits,// 数据位settings.StopBits,// 停止位settings.Parity,// 校验位(byte)settings.DeviceId// 设备ID);
也可以在设置页面修改:

位置控制参数
-
修改 MoveToPositionAsync方法可调整位置控制逻辑 -
调整位置精度: Math.Abs(currentPosition - position) < 1.0f
增加其他动作
可在ModbusManager中增加其他PLC控制动作,以满足特定需求。例如:增加 OK/NG 信号控制。
假设 PLC 通过写入寄存器 16 实现 OK/NG 信号控制,可以在ModbusManager中增加如下方法:
_modbusApi.WriteSingleRegister(16,isOK);
修改相机配置
修改相机配置
单相机的情况下,可以在设置页面修改,包括相机名称,触发方式等:

同时也可以在设置页面修改:
-
存图路径 -
存图质量 -
是否存储OK图或NG图
该开源工业视觉系统(项目地址:https://www.gitpp.com/gitstor/project-gpp-05250310909001)是一个基于.NET平台的完整软件框架,专为工业视觉检测场景设计。以下从核心功能、技术架构、应用场景及优势价值四个维度展开分析:
一、核心功能模块
- 相机连接与图像采集
-
支持主流工业相机协议(如GigE Vision、USB3 Vision等),兼容多品牌设备。 -
提供参数配置界面(曝光时间、增益、帧率等),支持多相机并行采集。 - 图像处理
-
集成OpenCV等库,提供图像滤波、边缘检测、形态学操作等基础功能。 -
支持自定义算法扩展,可对接Halcon、VisionPro等商业视觉库。 - 模型推理
-
内置深度学习推理引擎(如ONNX Runtime),支持TensorFlow、PyTorch模型部署。 -
提供模型管理界面,支持多模型切换与级联推理(如先检测后分类)。 - PLC控制
-
支持Modbus TCP/IP、OPC UA等工业协议,实现与PLC、机器人等设备的实时通信。 -
提供逻辑控制模块,可定义检测结果与设备动作的联动规则(如NG品分拣)。
二、技术架构特点
- 模块化设计
-
各功能模块解耦,支持独立开发、测试与替换。例如,可单独升级图像处理算法而不影响相机驱动。 - 跨平台兼容性
-
基于.NET Core/.NET 5+,支持Windows、Linux(如Ubuntu)部署,适应工业现场多样化环境。 - 低代码配置
-
提供可视化配置工具,用户无需编程即可完成检测流程设计(如拖拽式搭建图像处理管道)。 - 高性能优化
-
支持GPU加速(CUDA)、多线程并行处理,满足高帧率检测需求(如每秒处理30+帧)。
三、典型应用场景
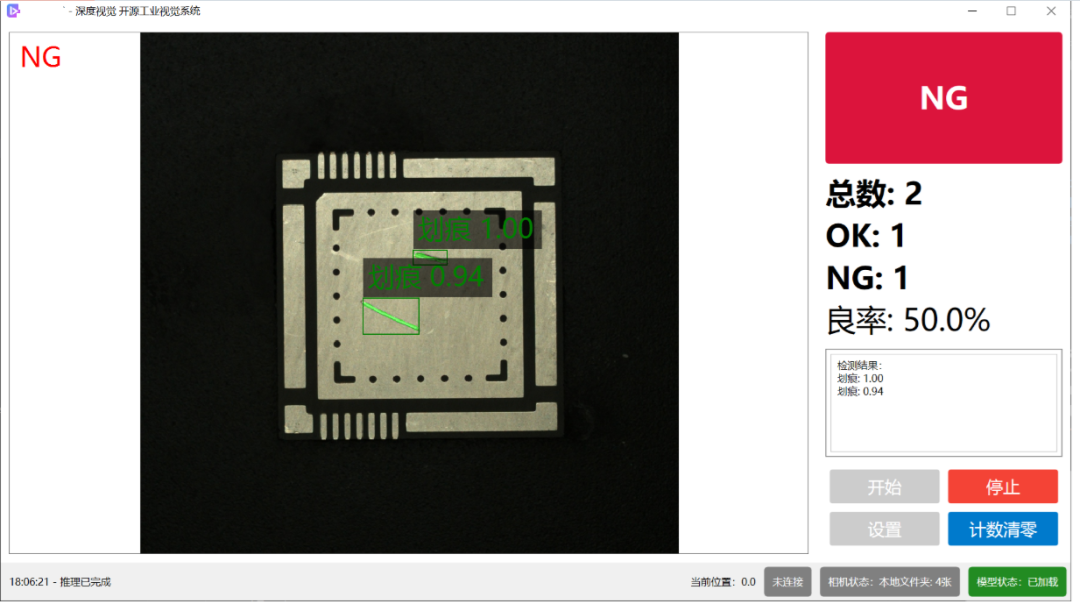
- 表面缺陷检测
-
检测金属、玻璃、纺织品等材料的划痕、裂纹、污渍等缺陷。 - 尺寸测量与定位
-
高精度测量工件尺寸、角度,或引导机器人抓取、装配。 - 字符识别(OCR)
-
读取产品标签、条码、二维码,实现生产追溯与防错。 - 机器人视觉引导
-
为工业机器人提供实时位置反馈,完成无序分拣、精密装配等任务。
四、优势与价值
- 快速开发
-
预置常用功能模块,开发周期可缩短50%以上,尤其适合中小型项目。 - 成本可控
-
开源授权(如MIT/Apache 2.0),无商业软件许可费用,降低项目预算。 - 灵活扩展
-
支持二次开发,可集成企业自有算法或对接MES、ERP等系统。 - 社区支持
-
依托开源社区,用户可获取技术文档、示例代码及问题解答。
五、潜在改进方向
- 增强AI功能
-
增加小样本学习、无监督学习支持,降低数据标注成本。 - 云边协同
-
支持边缘计算与云端模型更新,适应分布式检测场景。 - 行业模板库
-
提供电子、汽车、制药等行业的标准化检测流程模板,加速落地。
总结
该开源工业视觉系统通过模块化设计、跨平台支持与低代码配置,显著降低了工业视觉检测项目的开发门槛与成本。其核心价值在于快速构建可扩展的视觉检测系统,尤其适合中小型制造企业或自动化集成商。未来若能进一步强化AI能力与行业适配性,将更具竞争力。

本篇文章来源于微信公众号: GitHubFun网站
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END












暂无评论内容