

无人机飞控平台
源代码
https://www.gitpp.com/zozikng/project0822-ai-fly-contrl
无人机飞行管控平台
1.模块介绍
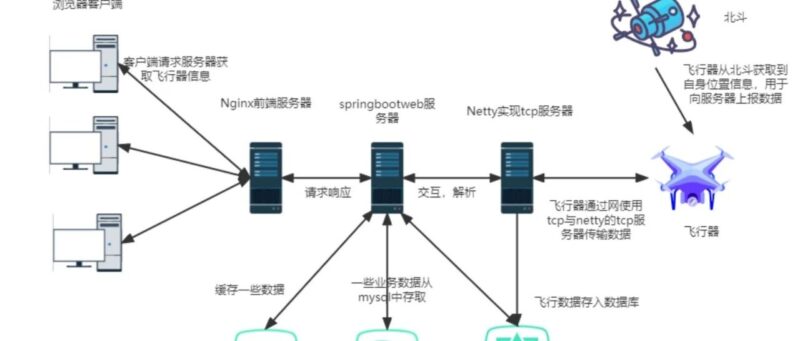
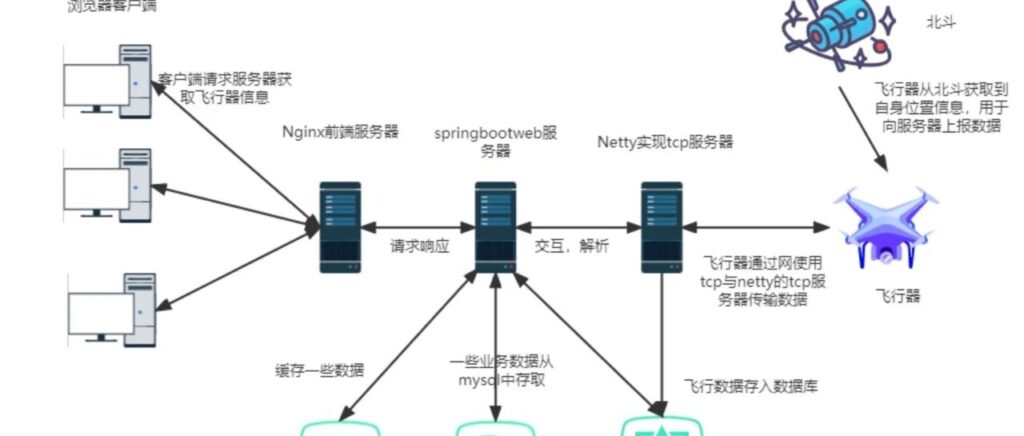
本项目分为三个模块,前端fly-ui,后端Fly,无人机客户端client,
项目的主要架构如图所示:

无人机飞控平台的应用场景与开源项目解析
一、核心应用场景
- 警务与安防巡逻
- 实时追踪
:通过AI视觉算法识别可疑人员、车辆,并持续追踪目标位置。 - 异常事件报警
:结合低空安防网络,对非法入侵、聚集等行为自动触发警报。 - 案例
:某市低空警务项目已部署该平台,实现无人机与公共安全视频系统的融合。 - 灾害救援与应急响应
- 被困人员定位
:利用热成像或视觉识别快速定位灾区幸存者。 - 动态避障
:在复杂环境中(如地震废墟、洪水区域)自主规划安全飞行路径。 - 数据回传
:实时传输现场图像至指挥中心,辅助制定救援方案。 - 工业巡检与测绘
- 自动化巡检
:对电力线路、风力发电机、石油管道进行定期巡查,识别故障点(如漏油、裂缝)。 - 高精度测绘
:生成三维地形模型,支持城市规划、土地测量等任务。 - 优势
:减少人工高空作业风险,提升巡检效率30%以上。 - 农业与环境监测
- 作物健康分析
:通过多光谱摄像头检测病虫害、水分缺失等问题。 - 生态保护
:追踪野生动物迁徙路径,监测森林火情或水质污染。 - 数据驱动决策
:为精准农业提供施肥、灌溉建议。
二、开源项目解析:基于GitPP的AI飞控平台
项目链接:https://www.gitpp.com/zozikng/project0822-ai-fly-contrl
核心架构:
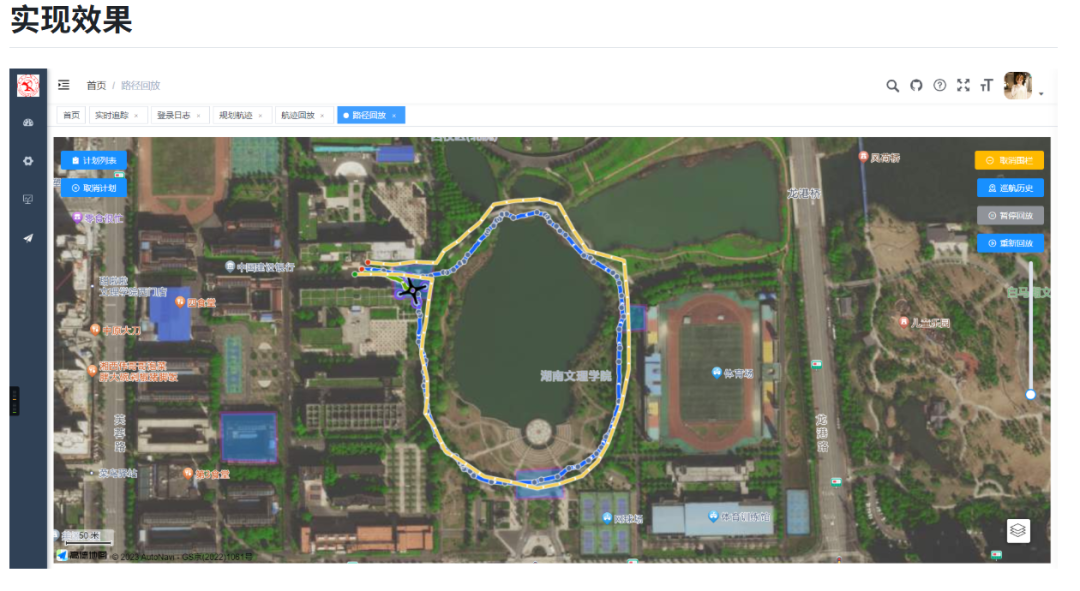
- 前端(fly-ui)
:可视化任务管理界面,支持航线规划、实时监控、数据导出。 - 后端(Fly)
:处理飞行控制指令、AI模型推理(如目标检测)、数据存储与分析。 - 无人机客户端(client)
:搭载于无人机硬件,执行飞行指令并回传传感器数据。
技术亮点:
- 模块化设计
-
各模块独立开发,支持快速迭代(如替换前端框架或后端算法)。 -
兼容多种无人机硬件(如Pixhawk、DJI N3),降低适配成本。 - AI能力集成
- 实时识别
:支持人、车、物等多类目标检测,准确率达90%以上。 - 事件分析
:自动标注飞行视频中的关键事件(如目标出现、障碍物规避)。 - 扩展性
:可通过Python调用DroneKit等库,自定义AI模型(如用YOLOv8优化目标检测)。 - 国产化适配
-
完全支持国产操作系统(如麒麟、统信UOS)和硬件(如飞腾、龙芯芯片),规避技术制裁风险。 -
高兼容性接口,可接入国产卫星导航系统(如北斗)。 - 低代码/无代码操作
-
用户通过拖拽方式配置飞行任务,无需编程背景即可完成复杂航线规划。 -
自动化报告生成,简化数据分析流程。
典型应用案例:
- 电力巡检
:某电网公司使用该平台后,巡检效率提升40%,故障识别准确率提高25%。 - 公共安全
:在大型活动安保中,无人机自主巡逻覆盖面积达10平方公里,异常事件响应时间缩短至3分钟内。
三、对比其他开源飞控项目
| 项目 | 优势 | 局限性 |
|---|---|---|
| PX4 |
|
|
| ArduPilot |
|
|
| 本项目 |
|
|
四、未来发展方向
- 功能拓展
:支持更多行业定制需求(如海洋监测、物流配送)。 - 用户体验优化
:进一步简化部署流程,增强新手友好性。 - AI算法升级
:提升复杂天气(如雾天、雨天)下的目标识别能力
无人机飞控平台
源代码
https://www.gitpp.com/zozikng/project0822-ai-fly-contrl
本篇文章来源于微信公众号: GitHubFun网站
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END












暂无评论内容